Step 1. Query influx token
# Search the influx "token" value in below output cat bitnami/influxdb/influxd.bolt | tr -cd "[:print:]"
Step 2. Create “UAVData” bucket (Inside Influx DB container)
influx bucket create -n UAVData -o primary -t <token>
Step 3. Fill the file config (UAV_insert.py)
DATASET_PATH = '/path/to/dataset.csv' # Replace to the UAV dataset path INFLUX_IP = 'localhost' # Influx IP INFLUX_TOKEN = 'VJpoNpqeVnjzvhpPm8jZ' # Influx token
Step 4. Excute the insert processing to insert data into Influx DB
python3 insert.py
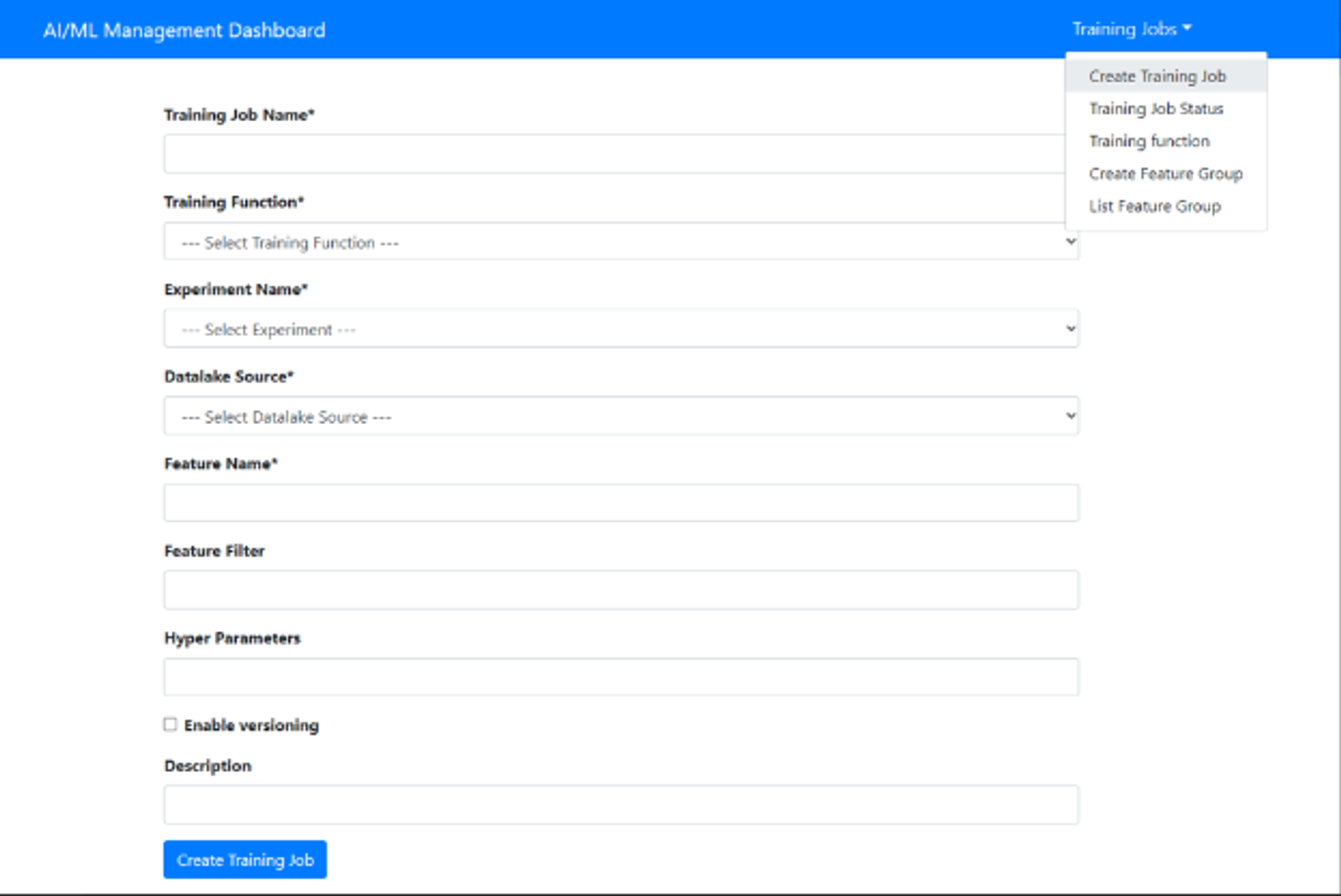
- Step 5. Upload UAV_pipeline.ipynb to aiml-notebook and generate a UAV_pipeline.yaml

- Step 6. Start a UAV model training job
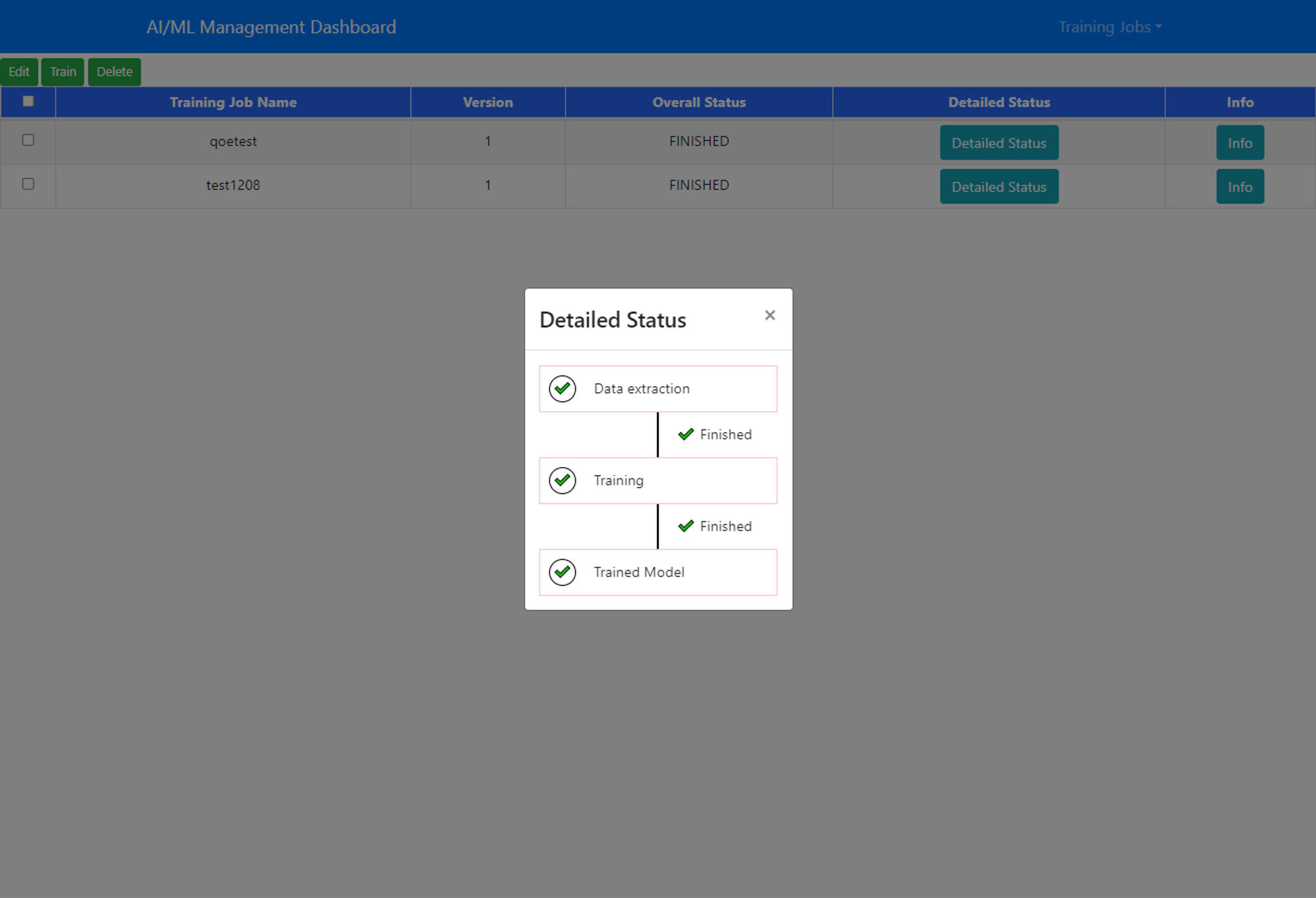
Step 7. Load UAV model



- Step 8. Start model prediction
1. obtain Ingress port for Kserve (kubectl get svc istio-ingressgateway -n istio-system).png?table=block&id=fca0908c-97a0-4d61-8591-0951fdabb102&spaceId=a06664e5-4f88-4be9-8924-05ba9a0ef65f&width=2000&userId=ca9c174f-b8e1-4470-bc49-462490c851d9&cache=v2)
2. source uav.sh
File List
UAV_dataset.csv (Download)
The file contains collected UAV movement path data.UAV_insert.py (Download)
The file processes the UAV_dataset and inserts the data into InfluxDB.
(Changed required: DATASET_PATH , INFLUX_IP , INFLUX_TOKEN)UAV_pipeline.ipynb (Download)
The file defines the model structure and training process.- UAV_deploy.yaml (Download)
The yaml file is used for deploying model inference service. UAV_input.json (Download)
The json file is the sample data for the prediction.UAV_predict.sh (Download)
The script used for excuting the model prediction.
Example
Input:
This input data represents a collection of points in a three-dimensional space, with each point defined by a set of three coordinates corresponding to the x, y, and z axes (After normalization).Example input
[ [0.7453425167510083, 0.057188434013895506, 0.3883151002000583], [0.9348491377517286, 0.5797269721343681, 0.15480809966429032], [0.32685562293198867, 0.40325520693639316, 0.37923173514277997], [0.07019999536045685, 0.26259026009845376, 0.2890220776419392], [0.562592860552039, 0.471677885159695, 0.41299704269747306], [0.8156868208972661, 0.6577897226335571, 0.5894501267006358], [0.6789936054809089, 0.5219624142693665, 0.4196227577850472], [0.10702478626584111, 0.3030673792265356, 0.5265722005767963], [0.9762029048313448, 0.30233720269747666, 0.4147831180404825], [0.5277344636914802, 0.1058208829010896, 0.9369119762104259] ]
Output:
The output should be next xyz-axis path prediction (After normalization).Example output
Inference Result: [[-0.07196578 0.05871227 -0.00614708]]
Contributor
- Joseph Thaliath - Samsung
- Antony Wang - NTUST MITab
- Jasmine Lee - NTUST MITLab