...
The Non-RealTime RIC (RAN Intelligent Controller) is an Orchestration and Automation function described by the O-RAN Alliance for non-real-time intelligent management of RAN (Radio Access Network) functions. The primary goal of the NONRTRIC the Non-RealTime RIC is to support non-real-time radio resource management, higher layer procedure optimization, policy optimization in RAN, and providing guidance, parameters, policies and AI/ML models to support the operation of near-RealTime RIC functions in the RAN to achieve higher-level non-real-time objectives. NONRTRIC functions include service and policy management, RAN analytics and model-training for the near-RealTime RICs. The nonNon-RealTime RIC project provides concepts, specifications, architecture and reference implementations as defined and described by the O-RAN Alliance architecture.
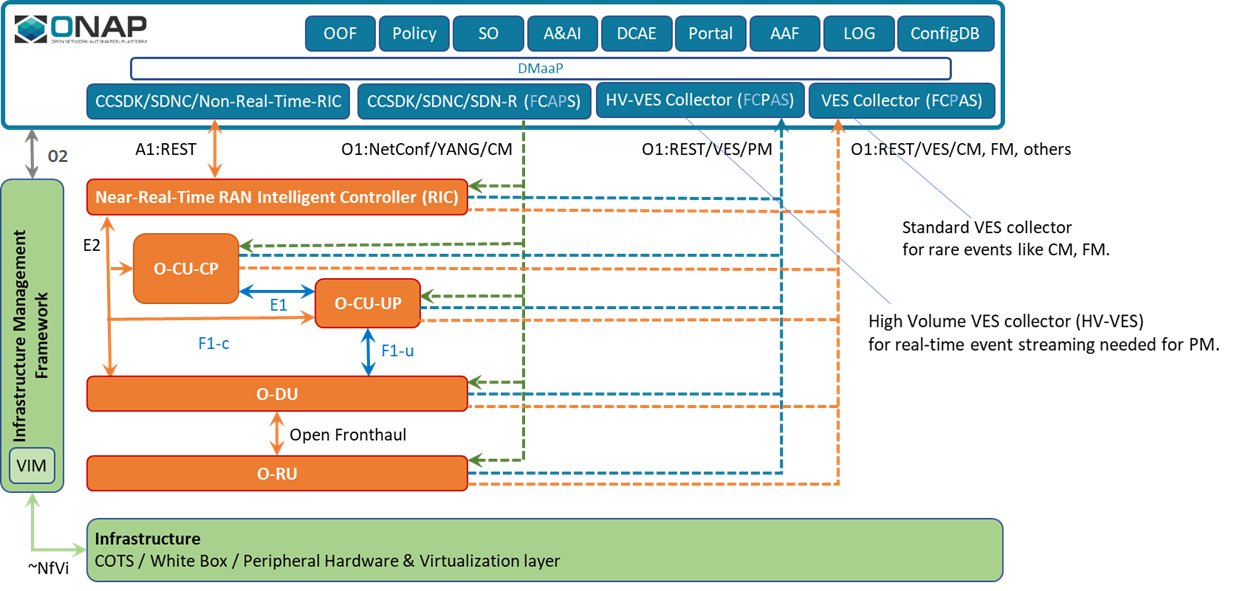
The OSC NONRTRIC implementation will communicate with near-RealTime RIC elements in the RAN via the A1 interface. Using the A1 interface the OSC NONRTRIC will facilitate the provision of policies for individual UEs or groups of UEsof A1 Policies; monitor and provide basic feedback on policy state from near-RealTime RICs; provide enrichment information A1 Enrichment Information as required by near-RealTime RICs; and facilitate ML model training, distribution and inference in cooperation with the near-RealTime RICs. ; act as a hosting platform for rApps (Non-RealTime RIC applications); host the R1 interface between rApps and the underlying SMO and Non-RT-RIC platforms; and manage the exposure towards rApps of SMO platform functions, Non-RT-RIC platform functions, and the capabilities of other rApps.
The As shown in the Component Architecture diagram below, the NONRTRIC functions partly leverage and extend some existing infrastructure from ONAP to support non-realtime control of the RAN (Radio Access Network).
...
The figure above shows a functional view of the Non-RealTime - RIC function in OSC. Many of the functions will be supported by the underlying SMO platform.
Functional view of OSC NONRTRIC - Latest available functionality
The figure above shows the latest released functionality for the Non-RealTime - RIC functions in OSC (D E Release & ONAP HonoluluIstanbul).
For more information see out E Release Developers Guide
Integration into ONAP
In the meeting from 2019-08-12 we clarified the expected integration of ONAP and OSC OAM/NONRTRIC functionality. Note the O1 and A1 interfaces and protocols.
Team
- PTL: John Keeney
- Committers: John Keeney Henrik Andersson Patrik Buhr
...
- nonrtric : https://gerrit.o-ran-sc.org/r/admin/repos/nonrtric
- portal/nonrtric-controlpanel : https://gerrit.o-ran-sc.org/r/admin/repos/portal/nonrtric-controlpanel
- sim/a1-interface : https://gerrit.o-ran-sc.org/r/admin/repos/sim/a1-interface
Overlap with ONAP / SMO
The early vision for the O-RAN Non-RealTime RIC, and OSC NONRTRIC project, did not significantly differentiate between SMO platform and Non-RT RIC platform functions, where the main SMO requirements could be partly fulfilled by using a combination of OSC OAM, OSC NONRTRIC, and ONAP functions (See OAM Project: SMO - Service Management and Orchestration).
In the meeting from 2019-08-12 we clarified the (then) expected integration of ONAP and OSC OAM/NONRTRIC functionality.
Since then OSC has created an OSC SMO project.
In the NONRTRIC project we will reuse ONAP (and other open-source) functions where needed, and where necessary support changes upstream if needed. We strongly believe that open-source software should be reused where possible and appropriate, the maximize community participation and avoid community fragmentation. For example, we reuse and contribute to the A1 Policy Management functions in ONAP, which emerged from a merging of related activities in both OSC and ONAP. We also reuse numerous other ONAP functions, e.g. SDNC, Control Loop, Policy Framework, CPS, DMaaP, DCAE VES & PM functions, etc..
Requirements
...