The primary goal of NONRTRIC - Non-RealTime RIC (RAN Intelligent Controller) - is to support non-real-time intelligent RAN (Radio Access Network) radio resource management, higher layer procedure optimization, policy optimization in RAN, and providing guidance, parameters, policies and AI/ML models to support the operation of near-RealTime RICs to achieve higher-level non-real-time objectives. NONRTRIC functions include service and policy management, RAN analytics and model-training for the near-RealTime RICs.
The non-RealTime RIC project provides concepts, specifications, architecture and reference implementations as defined and described by the O-RAN Alliance architecture.
The NONRTRIC, operating in the Orchestration and Automation domain, will communicate with near-RealTime RIC elements in the RAN via the A1 interface. Using the A1 interface the NONRTRIC will facilitate the provision of policies for individual UEs or groups of UEs; monitor and provide basic feedback on policy state from near-RealTime RICs ; provide enrichment information as required by near-RealTime RICs; and facilitate ML model training, distribution and inference in cooperation with the near-RealTime RICs.
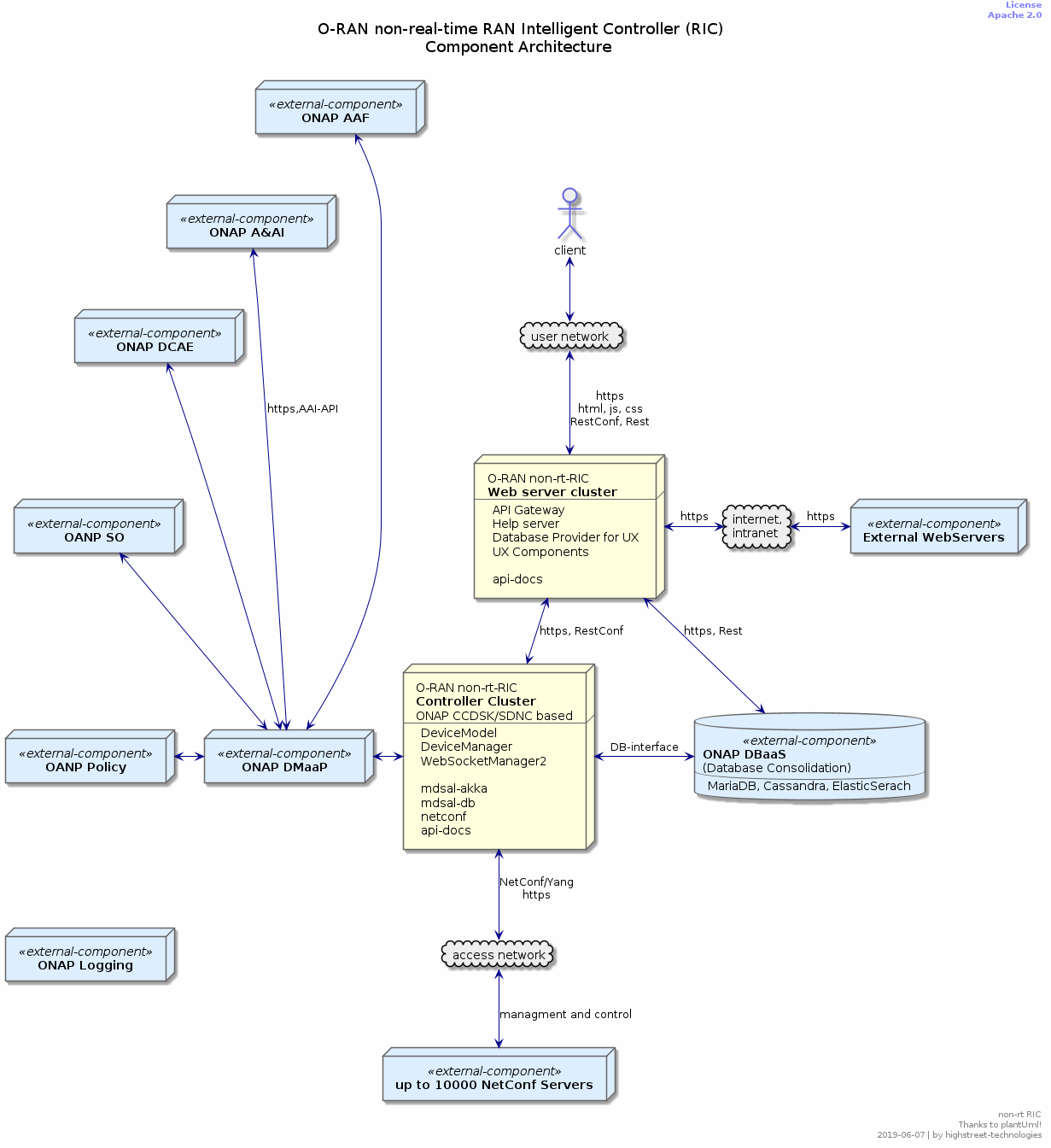
As shown in the Component Architecture diagram below, the NONRTRIC exists within the ONAP infrastructure, leveraging existing infrastructure to support non-realtime control of the RAN (Radio Access Network).
All implementations will be demonstrated in open community labs to prove functionalities and to give feedback to the O-RAN working groups.
Requirements:
Updated Project Proposal: 17 July 2019
FIRST PoC CONDUCTED Friday, June 28, 2019
- Slides & recording: Link to PoC read-out recording
SECOND PoC CONDUCTED Wednesday, July 24, 2019
Component Architecture
The following picture shows the main components and the dependencies to external projects.